



in PyTorch 2.0 in March 2023, the evolution of torch.compile has been probably the most thrilling issues to comply with. Provided that PyTorch’s recognition was resulting from its “Pythonic” nature, its ease of use, and its line-by-line (a.okay.a., keen) execution, the success of a just-in-time (JIT) graph compilation mode shouldn’t have been taken as a right. And but, simply over two years later, the significance of this characteristic can’t be overstated: It’s an important device in optimizing the runtime efficiency of AI/ML workloads.
Sadly, using torch.compile nonetheless feels a bit like a darkish artwork. When it really works it’s superior and everyone seems to be comfortable. Nevertheless, when it doesn’t, determining the explanation could be tough. It has a number of API controls, however realizing which of them to use and when — can seem to be black magic. Furthermore, its documentation is at present considerably decentralized, with the small print of a lot of its key options scattered throughout a number of posts and tutorials.
Though lined in a earlier publish, we felt that the fast evolution of torch.compile warranted a renewed dialogue. This publish makes an attempt to unveil a number of the mystique surrounding torch.compile. We are going to overview the way it works, exhibit its use, focus on a couple of methods for the best way to apply it most successfully, and consider the impression of a few of its options on the runtime efficiency of a toy mannequin. We are going to cowl the next subjects:
- strategies for avoiding the 2 “compilation-killers”, graph-breaks and recompilations,
- methods for debugging compilation points
- squeezing most efficiency utilizing a few of torch.compile’s superior options and configuration settings,
- benefiting from the torch.compile logs to debug compilation points,
- modular utility of torch.compile,
- strategies for decreasing compilation time,
- and extra.
As in our earlier posts, we’ll outline a toy PyTorch mannequin which we’ll use to exhibit the applying and impression of torch.compile. We are going to run our experiments on an Amazon EC2 p4d.96xlarge occasion (containing 8 NVIDIA A100 GPUs) working a PyTorch (2.7) Deep Studying AMI (DLAMI).
Disclaimers:
PyTorch compilation is a fancy matter with a constantly rising set of options. This publish makes no try to embody the complete scope of torch.compile, however slightly goals to supply some sensible tips about the best way to strategy it. For a whole reference, please see the official PyTorch documentation. However remember that chances are you’ll must surf by way of a number of pages to gather all the knowledge you want (e.g., right here for the API documentation, right here for an introductory tutorial, right here for a deep-dive on TorchDynamo, right here and right here for indices to many different pages masking a variety of compilation options, and so on.).
For those who desire a single supply with a complete overview of torch.compile, its interior workings, and detailed examples of its use, we advocate chapter 14 of the ebook AI Programs Efficiency Engineering, by Chris Fregly.
The code we’ll share is meant for demonstrative functions and shouldn’t be relied on for correctness or optimality — particularly for different tasks. Please don’t interpret our alternative of platform, framework, or some other device or library as an endorsement for its use.
The impression of torch.compile can range vastly primarily based on the small print of the AI/ML mannequin and runtime surroundings. The outcomes we’ll share on our toy mannequin will not be indicative of the outcomes you’ll get by yourself mannequin. Actually, compilation of some fashions could end in worse efficiency.
When utilized appropriately, torch.compile shouldn’t have an effect on the standard of your mannequin (within the case of inference) or its means to converge (within the case of coaching). Nevertheless, there are prone to be numerical variations resulting from using totally different compute kernels. It’s important that you simply confirm that making use of torch.compile doesn’t degrade your quality-performance metrics earlier than deploying it to a manufacturing surroundings.
Importantly, torch.compile continues to evolve with every PyTorch launch. The contents of this publish are primarily based on PyTorch 2.7. Staying up-to-date with newest PyTorch releases is important for making the most of the most recent and biggest accessible optimization alternatives.
PyTorch Compilation: The way it Works
In PyTorch’s default keen execution mode, every line of Python code is processed independently. Whereas this mode of execution is extraordinarily user-friendly — making it simple to comply with and debug line-per-line what the mannequin is doing — it misses an excessive amount of alternative to optimize efficiency, e.g.:
- GPU operations are carried out independently. This misses the chance for operator fusion the place GPU operations are mixed right into a single, extra environment friendly, GPU kernel.
- Potential optimizations from ahead-of-time (AOT) compilation, comparable to out-of-order execution and reminiscence format optimizations, are missed.
- The Python runtime is concerned in all phases of the mannequin execution. Each time an operation is launched on the GPU, management is handed from the Python interpreter to the CUDA backend and again. This could introduce important overhead.
How torch.compile Fixes This
First launched in PyTorch 2.0, torch.compile acts as a just-in-time (JIT) compiler: The primary time you name a compiled perform, the compiler traces the Python code and converts it into an intermediate graph illustration (IR) utilizing TorchDynamo, typically known as an FX Graph. If the compiled perform requires backpropagation, the FX Graph is handed to the AOTAutograd library which captures the backward cross ahead-of-time (AOT) and generates a mixed ahead and backward graph. The FX Graph is then handed to the compiler backend which performs kernel fusion, out-of-order execution, and different strategies to generate machine code that’s extremely optimized for the goal {hardware}.
The default PyTorch compiler backend is TorchInductor which helps each GPU and CPU targets. When compiling for NVIDIA GPUs, TorchInductor makes use of: 1) the Triton compiler (beforehand lined in this publish) to create optimum GPU kernels and a pair of) CUDA Graphs (at any time when potential) to mix a number of GPU kernels into environment friendly, re-playable sequences.
The ultimate, machine-specific computation graph is cached and used for every subsequent invocation of the compiled perform/mannequin. Be aware that though the majority of the compilation is carried out on the primary invocation, a number of further warm-up passes are sometimes required to succeed in peak efficiency.
The mixed JIT and AOT properties of torch.compile permit it to maximise alternatives for graph optimization, whereas using the compiled execution graph avoids the line-by-line involvement of the Python interpreter — thereby addressing the three aforementioned inefficiencies of keen execution.
Avoiding Compilation Pitfalls
Normally, making use of torch.compile will increase your mannequin throughput (e.g., see the TorchInductor efficiency dashboard). Nevertheless, typically chances are you’ll discover that torch compilation ends in the identical and even worse efficiency than in keen mode. There could possibly be a lot of causes for this:
- There could also be a bottleneck within the coaching step that’s overshadowing the torch.compile optimization, e.g., a knowledge enter pipeline bottleneck. This may be recognized and solved by way of applicable efficiency evaluation and optimization.
- Your perform or mannequin would possibly already be so environment friendly that the applying of torch.compile is negligible.
- You could be affected by one in all two compilation killers, graph-breaks and recompilations, which we elaborate on within the subsequent sections.
PyTorch Compilation Killer #1: Graph-Breaks
Graph-breaks are probably the most widespread occasions that intervene with environment friendly torch compilation. Graph-breaks happen when the TorchDynamo or AOTAutograd libraries encounter Python operations that they can not convert right into a graph operation. In such circumstances, the sections of code earlier than and after the problematic operation, are compiled individually and the resultant graph is claimed to include a graph-break. Graph-breaks intervene with the compiler’s capability for optimization in two major methods: First, optimizations comparable to kernel fusion can’t be carried out throughout graph breaks and, second, a graph break implies a return of management to the Python interpreter. The presence of numerous graph breaks can fully cancel out the potential good thing about torch.compile. Widespread examples of graph breaks embrace print() operations, conditional logic, and asserts.
What’s irritating is that, as a rule, graph-breaks could be simply prevented. What’s much more irritating is that the default habits is to deal with graph breaks by silently falling again to keen execution for the problematic code section.
Avoiding Graph-Breaks
Step one to dealing with graph-breaks is to configure the compiler to report them. Listed below are a number of methods of doing this:
- Apply the torch._dynamo.clarify operator to your (uncompiled) mannequin and run it on a pattern enter (as demonstrated right here). This can end in a log containing an inventory of the entire graph-breaks.
- Set the TORCH_LOGS surroundings variable to incorporate “graph_breaks”. This can trigger the compiler to print the graph-breaks it encounters throughout compilation.
- Name with torch.compile with fullgraph=True. This can trigger the compilation to fail every time it encounters a graph-break — thereby forcing the developer to acknowledge its presence and doubtlessly repair it.
Whereas our private desire is possibility three, you will need to observe that there are occasions the place graph-breaks can’t be prevented, which signifies that we could must disable fullgraph in a manufacturing setting. The perfect instance of that is distributed coaching (e.g., DDP and FSDP) the place the computation group consists of communication calls which (as of the time of this writing) will not be supported by torch.compile and, thus, end in graph-breaks.
With data of the situation of our graph breaks, we deal with each individually. We take away redundant prints and assertions, exchange conditional blocks with graph-friendly alternate options comparable to torch.the place or torch.cond, and regulate our mannequin implementation to reduce untraceable Python management stream and native operations. In some circumstances, we could want to keep up a number of the prints or assertions for working in keen mode; on this case, we are able to wrap them in a conditional test like if not torch.compiler.is_compiling(). There could also be circumstances (e.g., DDP) the place graph-breaks are unavoidable.
See right here for extra on avoiding graph-breaks.
PyTorch Compilation Killer #2: Recompilations
The second potential compilation killer is the graph recompilation. Throughout the preliminary graph compilation section, a number of assumptions are made and relied upon for producing the resultant graph. In torch.compile lingo these assumptions are known as guards. Widespread guards embrace the information sorts and shapes of enter tensors. On every iteration, these guards are verified on the present tensor inputs and coaching state. If one of many guards is violated, the present graph is deemed invalid for the present state and a brand new graph is generated, i.e., the graph is recompiled. Graph compilation takes a particularly very long time relative to the time it takes to execute a compiled graph. Consequently, a number of recompilations is prone to erase any potential efficiency features from torch.compile. Furthermore, torch.compile has a recompilation restrict (the default is 8) after which it would increase a torch._dynamo.exc.RecompileLimitExceeded exception and fall again to keen mode.
Avoiding Recompiles
Right here too, step one is figuring out the causes of the recompilations. As soon as once more, there are a number of choices:
- Use torch_compiler.set_stance operator to fail on recompile:
torch.compiler.set_stance(“fail_on_recompile”). In observe, this feature can typically show to be too limiting. - Set the TORCH_LOGS surroundings variable to incorporate “recompiles”. This can trigger the compiler to report every time it performs recompilation together with the guards that have been violated.
Compiling Graphs with Variable-Formed Tensors
One of the widespread causes of recompilations is the presence of tensors with dynamic shapes. The primary time a graph is compiled it creates guards in keeping with the shapes of the tensors it traced. When a tensor adjustments form in a subsequent step, the guard is violated and the graph is recompiled. There are a number of methods of dealing with tensors with dynamic shapes:
- Default Compilation Conduct: If the dynamic subject of the torch.compile name just isn’t set (or set to None), every time the compiler encounters a brand new dynamic tensor, it would carry out recompilation to generate a brand new graph that helps the dynamism it recognized. On this possibility, the graph modification is utilized surgically, permitting for “static” optimizations to be utilized to different parts of the graph. If new dynamism is found in a number of iterations, we could hit the recompilation restrict and fall again to keen execution. Consequently, this feature ought to solely be used for fashions with restricted dynamism.
- Mark Dynamic Tensors: Another choice is to explicitly mark the dynamic tensors and related dynamic axis utilizing the torch._dynamo.mark_dynamic API. This informs the compiler to construct a graph that helps the reported dynamism and prevents recompilations altogether. This can be a nice possibility in conditions by which you realize upfront what your dynamic shapes are (which you completely ought to!!).
- Dynamic Compilation: The third possibility is to use torch.compile with dynamic=True. This instructs the compiler to assemble a graph that’s as dynamic as potential in an effort to keep away from recompilations. When enabled, dynamic form tracing is utilized to the entire tensors within the graph. That is typically overkill. Remember that many graph optimization strategies (e.g., CUDA graphs) assume static shapes. These are mechanically disabled when this setting is utilized. This selection ought to be prevented at any time when potential.
- Generate a Restricted Variety of Static Graphs: When torch.compile is utilized with dynamic=False, the compiler won’t ever generate dynamic graphs. Every time a guard is violated a brand new static graph is created, supporting the newly encountered tensor form, and added to the compilation cache. Whereas restricted (by the recompilation restrict) within the variety of shapes it may well assist, this feature is compelling resulting from the truth that it permits for optimizations that assume a static graph. To profit from this functionality, a standard strategy is to take away dynamism from the graph by padding dynamic tensors to a hard and fast size. A extra superior strategy that reduces the quantity of padding is to set a lot of fastened size values (e.g., powers of two) and pad the variable formed tensors to the closest size. The variety of size values shouldn’t exceed the recompilation restrict. This can end in a hard and fast variety of recompilations and a hard and fast variety of extremely optimized graphs. We are able to be sure that all graphs are created in the course of the mannequin warmup section.
As earlier than, there are some conditions the place graph recompilations can’t be prevented, and we could haven’t any alternative however to run our mannequin in keen mode.
See right here for extra on avoiding recompilations and right here for particulars on how torch.compile handles dynamic shapes.
Debugging Compilation Points
Inevitably, you’ll encounter some conditions the place torch compilation fails. Typically, you’ll get an extended error message and callstack, however it could as nicely be in a overseas language. You’ll doubtless be inspired to Set TORCH_LOGS=”+dynamo” and TORCHDYNAMO_VERBOSE=1 however chances are you’ll discover that this does little that will help you resolve the issue.
The torch.compile troubleshooting information provides a number of suggestions for diagnosing compilation errors (e.g., by compiling with “keen”, “aot_eager” and “inductor” backends), for fixing or avoiding them, and if all else fails, for reporting them to PyTorch. On this publish we name out two totally different approaches for tackling robust compilation points.
High-Down VS. Backside-Up Method
In a top-down strategy, we apply torch compilation on the highest-level perform/mannequin — come what could. We then start to work by way of the compilation points as they arrive up by both fixing them or eradicating them from the graph by way of the torch.compiler.disable utility. This strategy assumes that we’re sufficiently in a position to decipher the compilation logs — at the least nicely sufficient to navigate to the problematic line of code.
In a bottom-up strategy, we start by making use of compilation to some low-level parts and slowly improve the scope of compilation till we hit an error. This strategy makes it simple to pinpoint the sources of the compilation challenge. A further benefit is that we are able to profit from the outcomes of {a partially} compiled graph whereas we proceed to work on further optimizations. That is opposite to the High-Down strategy the place we’ll solely have a workable graph as soon as all points are addressed.
The perfect strategy is determined by the mannequin at hand and your private inclination.Typically, a mixture of the 2 delivers the very best outcomes: for instance, figuring out points by way of a bottom-up strategy, resolving them, after which testing if the complete graph compilation works.
Tuning for Maximal Efficiency
After getting succeeded in compiling your mannequin, there are a variety of controls for attempting to squeeze out even higher efficiency. On this part we’ll cowl a number of the accessible choices. It ought to be famous that the extra efficiency features from these choices are normally a small fraction of the features from the preliminary utility of ordinary compilation.
Superior Compiler Modes and Choices
The torch.compile API permits for tuning the compiler-backend habits by way of by way of the mode and choices parameters. There are dozens of knobs that may be utilized and assessed. Among the most notable ones are “reduce-overhead” — that optimizes extra aggressively to additional scale back the overhead of the kernel loading and Python interpreter, and “max-autotune” — probably the most aggressive optimization possibility that performs benchmarking of a number of kernel choices earlier than selecting probably the most environment friendly one. Each of those, significantly “max-autotune”, improve the compilation time, however normally end in extra environment friendly graphs.
Various the Compiler Backend
The default compiler backend is TorchInductor which helps quite a lot of goal gadgets. You possibly can specify the compiler backend by way of the backend parameter of the torch.compile API. Whereas different backends are unlikely to beat TorchInductor when working on NVIDIA GPUs, chances are you’ll discover them to carry out higher on different {hardware} gadgets (e.g., the ipex backend consists of optimizations that leverage the distinctive capabilities of Intel® CPUs).
Making use of Modular Compilation
Whereas it’s normally really helpful to use compilation to the complete mannequin, there are occasions the place the mannequin could be damaged into submodules that reply very otherwise to the compiler controls. For instance, in case your mannequin incorporates one part that features many tensors with dynamic shapes and one other part that’s static, chances are you’ll discover that compiling the primary in “max-autotune-no-cudagraphs” mode and the second in “max-autotune” mode, ends in most efficiency.
Compiling the Optimizer
Along with compiling the mannequin execution, as of PyTorch 2.2, you’ll be able to additional optimize your coaching workload by compiling the optimizer. This will likely be demonstrated under.
New Compiler Options
Because the preliminary launch of torch.compile in PyTorch 2.0, every PyTorch launch has included enhancements to the torch.compile providing. Typically launched as “prototypes”, new options choices problem builders to extract even larger efficiency out of graph compilation. For instance, the PyTorch 2.7 launch included the foreach_map prototype characteristic, using which we’ll exhibit under.
Decreasing Compilation Time
Whereas the preliminary compilation and warm-up time could be fairly lengthy in comparison with the following coaching steps, it’s normally negligible in comparison with the general lifetime of the mannequin (i.e., the coaching or inference time). In some circumstances, nevertheless, the prolonged compilation time can change into a difficulty. If the mannequin is extraordinarily massive and we’re tuning for optimum efficiency, compilation may take hours. If we’re utilizing our mannequin in an inference server setup, the mannequin start-up time may have a direct impression on the server response time and person expertise.
On this part we cowl two strategies for decreasing mannequin compilation time: compile-time caching and regional compilation.
Compile Time Caching
In compile-time caching we add the outcomes of the native graph compilation to persistent storage. Each time we have to run the identical mannequin in the identical runtime surroundings (e.g., similar {hardware} and similar library variations) we pull the cache state from persistent storage to the native disk, as a substitute of compiling from scratch.
Regional Compilation
Regional compilation depends on the truth that massive fashions sometimes encompass computation blocks which are repeated a number of instances. In regional compilation, torch.compile is utilized to the repeating block, as a substitute of the complete mannequin. The result’s a single, comparatively small graph that’s created and reused for every of the blocks.
Easy methods to Configure the TORCH_LOGS Surroundings Variable
Torch compilation helps all kinds of logging controls. Whereas the log studies could be extraordinarily helpful for debugging points and maximizing efficiency, it’s essential to search out the suitable steadiness the place the logs are useful however not extreme. On this publish we suggest utilizing the next preliminary configuration and adapting as wanted:
export TORCH_LOGS="graph_breaks,recompiles,perf_hints"- “graph_breaks” — studies every time a graph-break is encountered (see above)
- “recompiles” — studies every time a recompilation is carried out together with the guard-violation that triggered it.
- “perf_hints” — outputs efficiency logs from the inductor backend together with hints for extra optimizations
Be aware that typically “perf_hints” will flood the console with unactionable messages, by which case chances are you’ll decide to disable it.
A Toy PyTorch Mannequin: Picture Captioning
To exhibit torch.compile in motion, we outline a toy picture captioning mannequin utilizing the favored Hugging Face transformers library (model 4.54.1). Particularly, we outline an image-to-text mannequin utilizing a VisionEncoderDecoderModel, with a Imaginative and prescient Transformer (ViT) encoder and a GPT-2 decoder, and practice it on an artificial dataset of fixed-sized photographs and random sequences (“captions”) of variable size.
We start by defining our image-to-text mannequin:
import os, shutil, time, random, torch
from transformers import (
VisionEncoderDecoderModel,
VisionEncoderDecoderConfig,
AutoConfig
)
torch.manual_seed(42)
random.seed(42)
BATCH_SIZE = 64
NUM_WORKERS = 12
NUM_TOKENS = 1024
MAX_SEQ_LEN = 256
PAD_ID = 0
START_ID = 1
END_ID = 2
# arrange image-to-text mannequin
def get_model():
config = VisionEncoderDecoderConfig.from_encoder_decoder_configs(
encoder_config=AutoConfig.for_model("vit"), # vit encoder
decoder_config=AutoConfig.for_model("gpt2") # gpt2 decoder
)
config.decoder.vocab_size = NUM_TOKENS
config.decoder.use_cache = False
config.decoder_start_token_id = START_ID
config.pad_token_id = PAD_ID
config.eos_token_id = END_ID
config.max_length = MAX_SEQ_LEN
mannequin = VisionEncoderDecoderModel(config=config)
# take away unused pooler
mannequin.encoder.pooler = None
# uncomment to specify the loss perform
# from transformers.loss.loss_utils import ForCausalLMLoss
# mannequin.loss_function = ForCausalLMLoss
return mannequinSubsequent, we outline an artificial dataset that generates pairs of random photographs of fastened measurement and random sequences of variable measurement. We use a weighted distribution for the sequence size to imitate a state of affairs the place the overwhelming majority of sequences are quick.
Given the various size of the enter captions, we require a technique for coping with dynamically formed enter. Right here, we provide two alternate options, each of which use padding: padding to the utmost enter size and padding to the size of the longest sequence within the batch, together with an choice to align it to a given a number of. Please see our earlier publish for extra methods for dealing with variable-length enter sequences.
from torch.utils.knowledge import Dataset, DataLoader
from functools import partial
# An artificial Dataset with random photographs and captions
class FakeDataset(Dataset):
def __init__(self):
self.length_dist = {
'quick': {'vary': (5, 32), 'weight': 0.90},
'medium': {'vary': (33, 64), 'weight': 0.09},
'lengthy': {'vary': (65, 256), 'weight': 0.01}
}
tremendous().__init__()
def __len__(self):
return 1000000
def __getitem__(self, index):
length_bin = random.decisions(
checklist(self.length_dist.keys()),
weights=[d['weight'] for d in self.length_dist.values()],
okay=1
)[0]
range_start, range_end = self.length_dist[length_bin]['range']
picture = torch.randn(3, 224, 224)
size = random.randint(range_start, range_end - 1)
labels = torch.cat([torch.randint(1, NUM_TOKENS, (length,)),
torch.tensor([END_ID])],
dim=0)
input_ids = torch.cat([torch.tensor([START_ID]),
labels[:-1]],
dim=0)
return {
'picture': picture,
'input_ids': input_ids,
'labels': labels
}
def pad_sequence(sequence, size, pad_val):
return torch.nn.purposeful.pad(
sequence,
(0, size - sequence.form[0]),
worth=pad_val
)
def collate_with_padding(batch, pad_to_longest=False, align=None):
padded_inputs = []
padded_labels = []
if pad_to_longest:
pad_len = max([b['input_ids'].form[0] for b in batch])
if align:
pad_len = ((pad_len + align - 1) // align) * align
else:
pad_len = MAX_SEQ_LEN
for b in batch:
input_ids = b['input_ids']
labels = b['labels']
padded_inputs.append(pad_sequence(input_ids, pad_len, PAD_ID))
padded_labels.append(pad_sequence(labels, pad_len, -100))
padded_inputs = torch.stack(padded_inputs, dim=0)
padded_labels = torch.stack(padded_labels, dim=0)
photographs = torch.stack([b['image'] for b in batch], dim=0)
return {
'pixel_values': photographs,
'decoder_input_ids': padded_inputs,
'labels': padded_labels,
'decoder_attention_mask': (padded_inputs != PAD_ID)
}
def get_dataloader(pad_to_longest=False, align=None):
return DataLoader(
dataset=FakeDataset(),
batch_size=BATCH_SIZE,
num_workers=NUM_WORKERS,
collate_fn=partial(
collate_with_padding,
pad_to_longest=pad_to_longest,
align=align
)
)Final, we outline our coaching step and most important coaching perform:
def copy_to_device(batch, gadget):
return {
key: val.to(gadget=gadget, non_blocking=True)
for key, val in batch.objects()
}
def train_step(mannequin, gadget, optimizer, batch):
# copy knowledge to gadget
batch = copy_to_device(batch, gadget)
optimizer.zero_grad()
with torch.amp.autocast('cuda', dtype=torch.bfloat16):
outputs = mannequin(**batch)
loss = outputs.loss
loss.backward()
optimizer.step()
return loss
def practice(local_rank=0, world_size=1, compile=False):
# specify log settings
torch._logging.set_logs(
graph_breaks=True,
recompiles=True,
perf_hints=True
)
torch.cuda.set_device(local_rank)
gadget = torch.cuda.current_device()
if world_size > 1:
# DDP setup
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
os.environ['MASTER_ADDR'] = 'localhost'
os.environ['MASTER_PORT'] = str(2222)
dist.init_process_group('nccl', rank=local_rank,
world_size=world_size)
# configure pad_to_longest and non-obligatory alignment
dataloader = get_dataloader(pad_to_longest=False, align=None)
mannequin = get_model()
mannequin = mannequin.to(gadget)
if world_size > 1:
mannequin = DDP(mannequin, [local_rank])
optimizer = torch.optim.Adam(mannequin.parameters())
if compile:
# uncomment to run pre-compile warmup - required for some optimizations
# batch = subsequent(iter(dataloader))
# train_step(mannequin, gadget, optimizer, batch)
mannequin, optimizer = apply_compilation(mannequin, optimizer)
warmup = 20
lively = 100
total_steps = warmup + lively
t0 = time.perf_counter()
for idx, batch in enumerate(dataloader, begin=1):
# apply practice step
train_step(mannequin, gadget, optimizer, batch)
if idx == warmup:
torch.cuda.synchronize()
print(f'warmup time: {time.perf_counter()-t0}')
t0 = time.perf_counter()
elif idx == total_steps:
break
if local_rank == 0:
torch.cuda.synchronize()
total_time = time.perf_counter() - t0
print(f'common throughput: {lively / total_time}')
if world_size > 1:
dist.destroy_process_group()
if __name__ == '__main__':
# specify inductor cache dir
inductor_cache_dir = '/tmp/inductor_cache'
os.environ['TORCHINDUCTOR_CACHE_DIR'] = inductor_cache_dir
# clear up compiler cache
torch._dynamo.reset()
shutil.rmtree(inductor_cache_dir, ignore_errors=True)
world_size = 1
torch.multiprocessing.spawn(
fn=practice,
args=(world_size,),
nprocs=world_size,
be a part of=True
)Baseline Efficiency
Operating the coaching script with out compilation yields the next baseline efficiency outcomes:

We are able to see clearly that the collation technique that reduces padding ends in a lot better efficiency.
Making use of Mannequin Compilation
On this part we’ll apply torch compilation with totally different configurations and measure its impression on the coaching throughput. We are going to start by making use of compilation with out dynamism, i.e., when padding all inputs to max sequence size. Within the following part we’ll consider its impression within the case of inputs with dynamic shapes.
Mannequin Compilation Step #1: Fixing Graph Breaks
We introduce the next compilation utility perform and apply it to our mannequin:
def apply_compilation(mannequin, optimizer):
mannequin = torch.compile(mannequin, fullgraph=True)
return mannequin, optimizerThe fullgraph setting ensures that compilation will fail at any time when it encounters a graph break. Positive sufficient, our first compilation try ends in an error coming from the transformer library. Here’s a small snippet:
from person code:
File "/decide/pytorch/lib/python3.12/site-packages/transformers/fashions/vision_encoder_decoder/modeling_vision_encoder_decoder.py", line 574, in ahead
loss = self.loss_function(
File "/decide/pytorch/lib/python3.12/site-packages/transformers/modeling_utils.py", line 5776, in loss_functionThe explanation for this error is that when the VisionEncoderDecoderModel loss perform just isn’t specified, the transformers library makes use of native Python code to find out what loss perform to use. That is simple to repair by specifying the mannequin loss perform, as follows:
from transformers.loss.loss_utils import ForCausalLMLoss
mannequin.loss_function = ForCausalLMLossFollowing this repair, mannequin compilation succeeds. The resultant throughput is 5.17 steps per second — a 66% speed-up over the baseline (fixed-input) throughput.
Be aware that within the present state of affairs of a static graph, the compiler didn’t report any recompilations, but it surely did report the next perf_hint:
I0805 13:37:52.406000 51587 torch/_inductor/codegen/simd.py:1976] [0/0] [__perf_hints] Discount over non-contiguous dims.
I0805 13:37:52.406000 51587 torch/_inductor/codegen/simd.py:1976] [0/0] [__perf_hints] Take into account setting config.triton.tile_reductions to True.Nevertheless, making use of the instructed configuration ends in a compilation error, so we ignore it going ahead.
Mannequin Compilation Step #2: Tuning the Compiler Configuration
Let’s attempt to improve the efficiency additional by making use of a number of the superior compilation controls. The code block under consists of three various modifications:
# reduce-overhead
mannequin = torch.compile(mannequin, fullgraph=True, mode="reduce-overhead")
# max-autotune
mannequin = torch.compile(mannequin, fullgraph=True, mode="max-autotune")
# shapes padding
mannequin = torch.compile(mannequin, fullgraph=True, choices={"shape_padding":True})The outcomes are captured within the desk under:

The next experiments on this part will likely be run with the “max-autotune” optimization.
Mannequin Compilation Step #3: Compiling the Optimizer
Subsequent, we prolong our answer to use compilation to the optimizer. Since optimizer compilation at present requires graph-breaks, we apply it with out the fullgraph flag:
def apply_compilation(mannequin, optimizer):
mannequin = torch.compile(mannequin, fullgraph=True, mode="max-autotune")
optimizer.step = torch.compile(optimizer.step)
return mannequin, optimizerCompiling the optimizer additional will increase the throughput to five.54 steps per second!!
When compiling the optimizer, the next efficiency trace is printed:
will likely be copied throughout cudagraphs execution.If utilizing cudagraphs and the grad tensor addresses would be the similar throughout runs, use torch._dynamo.decorators.mark_static_address to elide this copy.
The proposal is to repair the addresses of gradient tensors and mark them. To implement the suggestion, we introduce the next two utility features:
# this replaces default optimizer.zero_grad() and verifies reuse
# of similar gradient tensors
def zero_grads(mannequin):
for p in mannequin.parameters():
if p.grad just isn't None:
p.grad.zero_()
# makes use of dynamo utility to mark every of the gradient tensors as static
def mark_static_address(optimizer):
for group in optimizer.param_groups:
for p in group['params']:
if p.grad just isn't None:
torch._dynamo.mark_static_address(p.grad)The up to date coaching step seems under:
def train_step(mannequin, gadget, optimizer, batch):
# copy knowledge to gadget
batch = copy_to_device(batch, gadget)
zero_grads(mannequin)
with torch.amp.autocast('cuda', dtype=torch.bfloat16):
outputs = mannequin(**batch)
loss = outputs.loss
loss.backward()
mark_static_address(optimizer)
optimizer.step()
return lossIn our case, implementing the efficiency trace decreases the throughput consequence to five.32 steps per second — so we disregard it.
Mannequin Compilation Step #4: Foreach Map Optimization
Continually be looking out for torch.compile enhancements and additions. Right here we’ll apply horizontal fusion with foreach_map — an optimization launched within the newest PyTorch launch — to the optimizer step. Utilizing the utility features from the Foreach Map tutorial, we create an optimized Adam optimizer step perform, and apply it to our optimizer:
def get_compiled_adam_step(optimizer):
compiled_adam = torch.compile(foreach_map_adam)
inputs = get_inputs(optimizer)
def compiled_adam_step():
compiled_adam(*inputs)
return compiled_adam_step
def apply_compilation(mannequin, optimizer):
mannequin = torch.compile(mannequin, fullgraph=True, mode="max-autotune")
optimizer.step = get_compiled_adam_step(optimizer)
return mannequin, optimizerThis optimization requires use of the zero_grads utility from above. It additionally requires that we run a warmup coaching step earlier than compilation to populate the entire gradient tensors.
The modified optimizer step ends in a lowered throughput of 5.28 steps per second. We presume that our toy mannequin is simply too small to reap the advantage of the brand new compilation characteristic.
Our greatest consequence, 5.54 steps per second, is 78% quicker than our baseline consequence. Let’s see what occurs after we prolong our answer to a number of GPUs.
Mannequin Compilation Step #5: Extending to DDP
The ultimate step is to increase the coaching script to make use of all 8 GPUs. For this step we have to disable the fullgraph setting for the reason that cross-GPU gradient sharing requires graph-breaking communication calls.
The resultant throughput is 4.59 steps per second, practically two instances quicker than our baseline consequence.
Outcomes
The desk under summarizes the outcomes of our static-graph experiments:

So far, all of our experiments have assumed fixed-sized enter tensors. Because the overwhelming majority of enter sequences are small, our graph is performing an enormous quantity of wasteful computation.
Within the subsequent part we’ll consider torch.compile when padding to variable-length inputs.
Dynamic Mannequin Compilation
On this part we introduce dynamism into our toy mannequin definition by padding the inputs sequences in every batch to the size of the longest sequence. In a earlier part we described a number of methods for compiling dynamic graphs. We are going to apply these methods and assess their impression on the coaching throughput.
The experiments on this part have been run on a single NVIDIA A100 GPU.
Possibility #1: Auto-Detect Dynamism
The default habits (dynamic=None) of torch.compile is to auto-detect dynamism and recompile the graph accordingly. When working on this setting, we certainly see the recompilation because of the variation in enter measurement, however we additionally get the next print:
V0806 09:31:00.624000 175763 torch/_dynamo/guards.py:2997] [0/1] [__recompiles] - 0/1: ((decoder_input_ids.measurement()[1]*decoder_input_ids.measurement()[1]) % 8) != 0 # attn_output = torch.nn.purposeful.scaled_dot_product_attention( # transformers/integrations/sdpa_attention.py:89 in sdpa_attention_forward (_dynamo/utils.py:3284 in run_node)The supply of this recompilation is the scaled_dot_product_attention operator, which requires that enter shapes be aligned to multiples of eight for optimum use. To deal with this challenge and keep away from the recompilation, we modify our padding operation to pad to a a number of of eight.
To keep away from the recompilation that’s triggered by the variable-length inputs, we outline the next utility and apply it to the enter tensors:
def mark_dynamic(batch):
for key in ['decoder_input_ids', 'labels', 'decoder_attention_mask']:
torch._dynamo.mark_dynamic(batch[key], 1)
def train_step(mannequin, gadget, optimizer, batch):
# copy knowledge to gadget
batch = copy_to_device(batch, gadget)
# mark inputs as dynamic to keep away from recompilation
mark_dynamic(batch)
optimizer.zero_grad()
with torch.amp.autocast('cuda', dtype=torch.bfloat16):
outputs = mannequin(**batch)
loss = outputs.loss
loss.backward()
optimizer.step()
return lossThis selection ends in a throughput of seven.78 steps per second, 64% greater than the baseline throughput (4.73).
A further speed-up is achieved after we apply the “max-autotune” mode — 8.13 steps per second.
Possibility #2: Dynamic Compilation
One other option to keep away from recompilations is to name torch.compile with dynamic=True:
def apply_compilation(mannequin, optimizer):
mannequin = torch.compile(mannequin, fullgraph=True, dynamic=True)
optimizer.step = torch.compile(optimizer.step)
return mannequin, optimizerThis ends in a throughput of seven.77 steps per second. Since setting dynamic=True precludes using CUDA graphs, we try to optimize additional by setting mode=”max-autotune-no-cudagraphs”. This ends in a throughput of seven.89 steps per second.
Possibility #3: Compile a Fastened Variety of Static Graphs
The final possibility we discover is to set a hard and fast variety of supported enter shapes and compile a corresponding fastened variety of static graphs. Because the default variety of recompilations supported is eight, we program our collator to emit eight totally different tensor shapes by aligning the padding to multiples of 32. To pressure the recompilations, we set dynamic=False.
The resultant throughputs are for 7.77 steps per second for the default mode and eight.04 for mode=”max-autotune”.
Be aware that this feature could require a larger variety of warmup steps to make sure that all form variations are processed. (Another is to manually feed the mannequin with all form variations earlier than beginning the coaching loop.)
Modular Compilation
Since our mannequin naturally splits into two submodules — a static encoder and a dynamic decoder — it’s tempting to discover the choice of making use of separate compilation to every part. Be aware that in an inference setting, it’s important to compile the encoder and decoder individually, for the reason that encoder is known as solely as soon as, whereas the decoder is known as repeatedly in an auto-regressive loop.
def apply_compilation(mannequin, optimizer):
mannequin.encoder = torch.compile(mannequin.encoder, fullgraph=True)
mannequin.decoder = torch.compile(mannequin.decoder, fullgraph=True)
mannequin.loss_function = torch.compile(mannequin.loss_function, fullgraph=True)
optimizer.step = torch.compile(optimizer.step)
return mannequin, optimizerThe results of this technique is a throughput of seven.93, which is barely greater than the consequence we acquired (in default mode) when compiling the complete mannequin.
One benefit to this strategy is the power to tune the compilation controls to every submodule independently. For instance, setting mode=”max-autotune” to simply the encoder, additional elevated the throughput to eight.04 steps per second.
Outcomes
We summarize the outcomes of our dynamic-graph experiments within the desk under:

The perfect consequence was 8.13 steps per second, 72% greater than the baseline consequence (4.73). It’s doubtless that additional tuning may end in further features.
Remember that the impression of torch.compile can range vastly primarily based on the small print of the mannequin and the runtime surroundings.
Decreasing Compilation Time
We now flip our consideration to the period of the torch.compile warmup. We are going to assess the 2 optimizations mentioned above, compile-time caching and regional compilation. We restrict our experiments to a single GPU. We use the default utility of torch.compile and measure the period of the primary 20 coaching iterations.
Pre-Loading Compilation Cache
Within the following demonstration of compile-time caching, we use an Amazon S3 bucket as our persistent storage location:
import boto3
S3_BUCKET = ""
S3_KEY = ""
def download_cache():
s3_client = boto3.consumer('s3')
t0 = time.perf_counter()
strive:
response = s3_client.get_object(Bucket=S3_BUCKET, Key=S3_KEY)
artifact_bytes = response['Body'].learn()
torch.compiler.load_cache_artifacts(artifact_bytes)
print(f"Cache restored. Time: {time.perf_counter()-t0} sec")
besides:
return False
return True
def upload_cache():
s3_client = boto3.consumer('s3')
artifact_bytes, cache_info = torch.compiler.save_cache_artifacts()
s3_client.put_object(
Bucket=S3_BUCKET,
Key=S3_KEY,
Physique=artifact_bytes
)
if __name__ == '__main__':
# specify inductor cache dir
inductor_cache_dir = '/tmp/inductor_cache'
os.environ['TORCHINDUCTOR_CACHE_DIR'] = inductor_cache_dir
# clear up compiler cache
torch._dynamo.reset()
shutil.rmtree(inductor_cache_dir, ignore_errors=True)
# add the compilation artifacts
download_cache()
# practice the mannequin
practice()
# add the compilation artifacts
upload_cache()This methodology reduces the compilation warmup from 196 seconds to 56 seconds — a 3.5X speed-up.
Regional Compilation
To implement regional compilation, we apply compilation to the interior blocks of each the encoder and the decoder:
def apply_compilation(mannequin, optimizer):
mannequin.encoder.encoder.layer = torch.nn.ModuleList(
[torch.compile(layer, fullgraph=True)
for layer in model.encoder.encoder.layer]
)
mannequin.decoder.transformer.h = torch.nn.ModuleList(
[torch.compile(layer, fullgraph=True)
for layer in model.decoder.transformer.h]
)
mannequin.loss_function = torch.compile(mannequin.loss_function, fullgraph=True)
optimizer.step = torch.compile(optimizer.step)
return mannequin, optimizerThis transformation reduces the throughput from 7.78 steps per second to 7.61 steps per second. Alternatively, the compilation warmup drops from 196 seconds to 80 seconds — a 2.45X speed-up.
Within the case of our toy mannequin — which is extraordinarily small by right now’s requirements — the features we now have demonstrated are modest. However for giant fashions, some of these compilation-time optimization strategies may show important.
Abstract
As AI/ML fashions develop in measurement to tons of of billions and even trillions of parameters, optimizing their runtime efficiency turns into more and more important. For PyTorch fashions, torch.compile is among the strongest optimization instruments at your disposal. This publish has aimed to ease the adoption of torch.compile by addressing a few of its intricacies and demonstrating its sensible use. Among the most important strategies we lined have been:
- Decreasing graph-breaks and recompilations
- Tuning compilation settings to maximise efficiency features
- Efficient use of the PyTorch logs
- High-down vs. bottom-up debugging methods
- Modular utility of torch.compile
- Decreasing the period of compilation warmup
PyTorch compilation is a fancy and nuanced matter. On this publish we now have lined simply a few of its many options. For extra on the subject, be discuss with the official documentation.
in PyTorch 2.0 in March 2023, the evolution of torch.compile has been probably the most thrilling issues to comply with. Provided that PyTorch’s recognition was resulting from its “Pythonic” nature, its ease of use, and its line-by-line (a.okay.a., keen) execution, the success of a just-in-time (JIT) graph compilation mode shouldn’t have been taken as a right. And but, simply over two years later, the significance of this characteristic can’t be overstated: It’s an important device in optimizing the runtime efficiency of AI/ML workloads.
Sadly, using torch.compile nonetheless feels a bit like a darkish artwork. When it really works it’s superior and everyone seems to be comfortable. Nevertheless, when it doesn’t, determining the explanation could be tough. It has a number of API controls, however realizing which of them to use and when — can seem to be black magic. Furthermore, its documentation is at present considerably decentralized, with the small print of a lot of its key options scattered throughout a number of posts and tutorials.
Though lined in a earlier publish, we felt that the fast evolution of torch.compile warranted a renewed dialogue. This publish makes an attempt to unveil a number of the mystique surrounding torch.compile. We are going to overview the way it works, exhibit its use, focus on a couple of methods for the best way to apply it most successfully, and consider the impression of a few of its options on the runtime efficiency of a toy mannequin. We are going to cowl the next subjects:
- strategies for avoiding the 2 “compilation-killers”, graph-breaks and recompilations,
- methods for debugging compilation points
- squeezing most efficiency utilizing a few of torch.compile’s superior options and configuration settings,
- benefiting from the torch.compile logs to debug compilation points,
- modular utility of torch.compile,
- strategies for decreasing compilation time,
- and extra.
As in our earlier posts, we’ll outline a toy PyTorch mannequin which we’ll use to exhibit the applying and impression of torch.compile. We are going to run our experiments on an Amazon EC2 p4d.96xlarge occasion (containing 8 NVIDIA A100 GPUs) working a PyTorch (2.7) Deep Studying AMI (DLAMI).
Disclaimers:
PyTorch compilation is a fancy matter with a constantly rising set of options. This publish makes no try to embody the complete scope of torch.compile, however slightly goals to supply some sensible tips about the best way to strategy it. For a whole reference, please see the official PyTorch documentation. However remember that chances are you’ll must surf by way of a number of pages to gather all the knowledge you want (e.g., right here for the API documentation, right here for an introductory tutorial, right here for a deep-dive on TorchDynamo, right here and right here for indices to many different pages masking a variety of compilation options, and so on.).
For those who desire a single supply with a complete overview of torch.compile, its interior workings, and detailed examples of its use, we advocate chapter 14 of the ebook AI Programs Efficiency Engineering, by Chris Fregly.
The code we’ll share is meant for demonstrative functions and shouldn’t be relied on for correctness or optimality — particularly for different tasks. Please don’t interpret our alternative of platform, framework, or some other device or library as an endorsement for its use.
The impression of torch.compile can range vastly primarily based on the small print of the AI/ML mannequin and runtime surroundings. The outcomes we’ll share on our toy mannequin will not be indicative of the outcomes you’ll get by yourself mannequin. Actually, compilation of some fashions could end in worse efficiency.
When utilized appropriately, torch.compile shouldn’t have an effect on the standard of your mannequin (within the case of inference) or its means to converge (within the case of coaching). Nevertheless, there are prone to be numerical variations resulting from using totally different compute kernels. It’s important that you simply confirm that making use of torch.compile doesn’t degrade your quality-performance metrics earlier than deploying it to a manufacturing surroundings.
Importantly, torch.compile continues to evolve with every PyTorch launch. The contents of this publish are primarily based on PyTorch 2.7. Staying up-to-date with newest PyTorch releases is important for making the most of the most recent and biggest accessible optimization alternatives.
PyTorch Compilation: The way it Works
In PyTorch’s default keen execution mode, every line of Python code is processed independently. Whereas this mode of execution is extraordinarily user-friendly — making it simple to comply with and debug line-per-line what the mannequin is doing — it misses an excessive amount of alternative to optimize efficiency, e.g.:
- GPU operations are carried out independently. This misses the chance for operator fusion the place GPU operations are mixed right into a single, extra environment friendly, GPU kernel.
- Potential optimizations from ahead-of-time (AOT) compilation, comparable to out-of-order execution and reminiscence format optimizations, are missed.
- The Python runtime is concerned in all phases of the mannequin execution. Each time an operation is launched on the GPU, management is handed from the Python interpreter to the CUDA backend and again. This could introduce important overhead.
How torch.compile Fixes This
First launched in PyTorch 2.0, torch.compile acts as a just-in-time (JIT) compiler: The primary time you name a compiled perform, the compiler traces the Python code and converts it into an intermediate graph illustration (IR) utilizing TorchDynamo, typically known as an FX Graph. If the compiled perform requires backpropagation, the FX Graph is handed to the AOTAutograd library which captures the backward cross ahead-of-time (AOT) and generates a mixed ahead and backward graph. The FX Graph is then handed to the compiler backend which performs kernel fusion, out-of-order execution, and different strategies to generate machine code that’s extremely optimized for the goal {hardware}.
The default PyTorch compiler backend is TorchInductor which helps each GPU and CPU targets. When compiling for NVIDIA GPUs, TorchInductor makes use of: 1) the Triton compiler (beforehand lined in this publish) to create optimum GPU kernels and a pair of) CUDA Graphs (at any time when potential) to mix a number of GPU kernels into environment friendly, re-playable sequences.
The ultimate, machine-specific computation graph is cached and used for every subsequent invocation of the compiled perform/mannequin. Be aware that though the majority of the compilation is carried out on the primary invocation, a number of further warm-up passes are sometimes required to succeed in peak efficiency.
The mixed JIT and AOT properties of torch.compile permit it to maximise alternatives for graph optimization, whereas using the compiled execution graph avoids the line-by-line involvement of the Python interpreter — thereby addressing the three aforementioned inefficiencies of keen execution.
Avoiding Compilation Pitfalls
Normally, making use of torch.compile will increase your mannequin throughput (e.g., see the TorchInductor efficiency dashboard). Nevertheless, typically chances are you’ll discover that torch compilation ends in the identical and even worse efficiency than in keen mode. There could possibly be a lot of causes for this:
- There could also be a bottleneck within the coaching step that’s overshadowing the torch.compile optimization, e.g., a knowledge enter pipeline bottleneck. This may be recognized and solved by way of applicable efficiency evaluation and optimization.
- Your perform or mannequin would possibly already be so environment friendly that the applying of torch.compile is negligible.
- You could be affected by one in all two compilation killers, graph-breaks and recompilations, which we elaborate on within the subsequent sections.
PyTorch Compilation Killer #1: Graph-Breaks
Graph-breaks are probably the most widespread occasions that intervene with environment friendly torch compilation. Graph-breaks happen when the TorchDynamo or AOTAutograd libraries encounter Python operations that they can not convert right into a graph operation. In such circumstances, the sections of code earlier than and after the problematic operation, are compiled individually and the resultant graph is claimed to include a graph-break. Graph-breaks intervene with the compiler’s capability for optimization in two major methods: First, optimizations comparable to kernel fusion can’t be carried out throughout graph breaks and, second, a graph break implies a return of management to the Python interpreter. The presence of numerous graph breaks can fully cancel out the potential good thing about torch.compile. Widespread examples of graph breaks embrace print() operations, conditional logic, and asserts.
What’s irritating is that, as a rule, graph-breaks could be simply prevented. What’s much more irritating is that the default habits is to deal with graph breaks by silently falling again to keen execution for the problematic code section.
Avoiding Graph-Breaks
Step one to dealing with graph-breaks is to configure the compiler to report them. Listed below are a number of methods of doing this:
- Apply the torch._dynamo.clarify operator to your (uncompiled) mannequin and run it on a pattern enter (as demonstrated right here). This can end in a log containing an inventory of the entire graph-breaks.
- Set the TORCH_LOGS surroundings variable to incorporate “graph_breaks”. This can trigger the compiler to print the graph-breaks it encounters throughout compilation.
- Name with torch.compile with fullgraph=True. This can trigger the compilation to fail every time it encounters a graph-break — thereby forcing the developer to acknowledge its presence and doubtlessly repair it.
Whereas our private desire is possibility three, you will need to observe that there are occasions the place graph-breaks can’t be prevented, which signifies that we could must disable fullgraph in a manufacturing setting. The perfect instance of that is distributed coaching (e.g., DDP and FSDP) the place the computation group consists of communication calls which (as of the time of this writing) will not be supported by torch.compile and, thus, end in graph-breaks.
With data of the situation of our graph breaks, we deal with each individually. We take away redundant prints and assertions, exchange conditional blocks with graph-friendly alternate options comparable to torch.the place or torch.cond, and regulate our mannequin implementation to reduce untraceable Python management stream and native operations. In some circumstances, we could want to keep up a number of the prints or assertions for working in keen mode; on this case, we are able to wrap them in a conditional test like if not torch.compiler.is_compiling(). There could also be circumstances (e.g., DDP) the place graph-breaks are unavoidable.
See right here for extra on avoiding graph-breaks.
PyTorch Compilation Killer #2: Recompilations
The second potential compilation killer is the graph recompilation. Throughout the preliminary graph compilation section, a number of assumptions are made and relied upon for producing the resultant graph. In torch.compile lingo these assumptions are known as guards. Widespread guards embrace the information sorts and shapes of enter tensors. On every iteration, these guards are verified on the present tensor inputs and coaching state. If one of many guards is violated, the present graph is deemed invalid for the present state and a brand new graph is generated, i.e., the graph is recompiled. Graph compilation takes a particularly very long time relative to the time it takes to execute a compiled graph. Consequently, a number of recompilations is prone to erase any potential efficiency features from torch.compile. Furthermore, torch.compile has a recompilation restrict (the default is 8) after which it would increase a torch._dynamo.exc.RecompileLimitExceeded exception and fall again to keen mode.
Avoiding Recompiles
Right here too, step one is figuring out the causes of the recompilations. As soon as once more, there are a number of choices:
- Use torch_compiler.set_stance operator to fail on recompile:
torch.compiler.set_stance(“fail_on_recompile”). In observe, this feature can typically show to be too limiting. - Set the TORCH_LOGS surroundings variable to incorporate “recompiles”. This can trigger the compiler to report every time it performs recompilation together with the guards that have been violated.
Compiling Graphs with Variable-Formed Tensors
One of the widespread causes of recompilations is the presence of tensors with dynamic shapes. The primary time a graph is compiled it creates guards in keeping with the shapes of the tensors it traced. When a tensor adjustments form in a subsequent step, the guard is violated and the graph is recompiled. There are a number of methods of dealing with tensors with dynamic shapes:
- Default Compilation Conduct: If the dynamic subject of the torch.compile name just isn’t set (or set to None), every time the compiler encounters a brand new dynamic tensor, it would carry out recompilation to generate a brand new graph that helps the dynamism it recognized. On this possibility, the graph modification is utilized surgically, permitting for “static” optimizations to be utilized to different parts of the graph. If new dynamism is found in a number of iterations, we could hit the recompilation restrict and fall again to keen execution. Consequently, this feature ought to solely be used for fashions with restricted dynamism.
- Mark Dynamic Tensors: Another choice is to explicitly mark the dynamic tensors and related dynamic axis utilizing the torch._dynamo.mark_dynamic API. This informs the compiler to construct a graph that helps the reported dynamism and prevents recompilations altogether. This can be a nice possibility in conditions by which you realize upfront what your dynamic shapes are (which you completely ought to!!).
- Dynamic Compilation: The third possibility is to use torch.compile with dynamic=True. This instructs the compiler to assemble a graph that’s as dynamic as potential in an effort to keep away from recompilations. When enabled, dynamic form tracing is utilized to the entire tensors within the graph. That is typically overkill. Remember that many graph optimization strategies (e.g., CUDA graphs) assume static shapes. These are mechanically disabled when this setting is utilized. This selection ought to be prevented at any time when potential.
- Generate a Restricted Variety of Static Graphs: When torch.compile is utilized with dynamic=False, the compiler won’t ever generate dynamic graphs. Every time a guard is violated a brand new static graph is created, supporting the newly encountered tensor form, and added to the compilation cache. Whereas restricted (by the recompilation restrict) within the variety of shapes it may well assist, this feature is compelling resulting from the truth that it permits for optimizations that assume a static graph. To profit from this functionality, a standard strategy is to take away dynamism from the graph by padding dynamic tensors to a hard and fast size. A extra superior strategy that reduces the quantity of padding is to set a lot of fastened size values (e.g., powers of two) and pad the variable formed tensors to the closest size. The variety of size values shouldn’t exceed the recompilation restrict. This can end in a hard and fast variety of recompilations and a hard and fast variety of extremely optimized graphs. We are able to be sure that all graphs are created in the course of the mannequin warmup section.
As earlier than, there are some conditions the place graph recompilations can’t be prevented, and we could haven’t any alternative however to run our mannequin in keen mode.
See right here for extra on avoiding recompilations and right here for particulars on how torch.compile handles dynamic shapes.
Debugging Compilation Points
Inevitably, you’ll encounter some conditions the place torch compilation fails. Typically, you’ll get an extended error message and callstack, however it could as nicely be in a overseas language. You’ll doubtless be inspired to Set TORCH_LOGS=”+dynamo” and TORCHDYNAMO_VERBOSE=1 however chances are you’ll discover that this does little that will help you resolve the issue.
The torch.compile troubleshooting information provides a number of suggestions for diagnosing compilation errors (e.g., by compiling with “keen”, “aot_eager” and “inductor” backends), for fixing or avoiding them, and if all else fails, for reporting them to PyTorch. On this publish we name out two totally different approaches for tackling robust compilation points.
High-Down VS. Backside-Up Method
In a top-down strategy, we apply torch compilation on the highest-level perform/mannequin — come what could. We then start to work by way of the compilation points as they arrive up by both fixing them or eradicating them from the graph by way of the torch.compiler.disable utility. This strategy assumes that we’re sufficiently in a position to decipher the compilation logs — at the least nicely sufficient to navigate to the problematic line of code.
In a bottom-up strategy, we start by making use of compilation to some low-level parts and slowly improve the scope of compilation till we hit an error. This strategy makes it simple to pinpoint the sources of the compilation challenge. A further benefit is that we are able to profit from the outcomes of {a partially} compiled graph whereas we proceed to work on further optimizations. That is opposite to the High-Down strategy the place we’ll solely have a workable graph as soon as all points are addressed.
The perfect strategy is determined by the mannequin at hand and your private inclination.Typically, a mixture of the 2 delivers the very best outcomes: for instance, figuring out points by way of a bottom-up strategy, resolving them, after which testing if the complete graph compilation works.
Tuning for Maximal Efficiency
After getting succeeded in compiling your mannequin, there are a variety of controls for attempting to squeeze out even higher efficiency. On this part we’ll cowl a number of the accessible choices. It ought to be famous that the extra efficiency features from these choices are normally a small fraction of the features from the preliminary utility of ordinary compilation.
Superior Compiler Modes and Choices
The torch.compile API permits for tuning the compiler-backend habits by way of by way of the mode and choices parameters. There are dozens of knobs that may be utilized and assessed. Among the most notable ones are “reduce-overhead” — that optimizes extra aggressively to additional scale back the overhead of the kernel loading and Python interpreter, and “max-autotune” — probably the most aggressive optimization possibility that performs benchmarking of a number of kernel choices earlier than selecting probably the most environment friendly one. Each of those, significantly “max-autotune”, improve the compilation time, however normally end in extra environment friendly graphs.
Various the Compiler Backend
The default compiler backend is TorchInductor which helps quite a lot of goal gadgets. You possibly can specify the compiler backend by way of the backend parameter of the torch.compile API. Whereas different backends are unlikely to beat TorchInductor when working on NVIDIA GPUs, chances are you’ll discover them to carry out higher on different {hardware} gadgets (e.g., the ipex backend consists of optimizations that leverage the distinctive capabilities of Intel® CPUs).
Making use of Modular Compilation
Whereas it’s normally really helpful to use compilation to the complete mannequin, there are occasions the place the mannequin could be damaged into submodules that reply very otherwise to the compiler controls. For instance, in case your mannequin incorporates one part that features many tensors with dynamic shapes and one other part that’s static, chances are you’ll discover that compiling the primary in “max-autotune-no-cudagraphs” mode and the second in “max-autotune” mode, ends in most efficiency.
Compiling the Optimizer
Along with compiling the mannequin execution, as of PyTorch 2.2, you’ll be able to additional optimize your coaching workload by compiling the optimizer. This will likely be demonstrated under.
New Compiler Options
Because the preliminary launch of torch.compile in PyTorch 2.0, every PyTorch launch has included enhancements to the torch.compile providing. Typically launched as “prototypes”, new options choices problem builders to extract even larger efficiency out of graph compilation. For instance, the PyTorch 2.7 launch included the foreach_map prototype characteristic, using which we’ll exhibit under.
Decreasing Compilation Time
Whereas the preliminary compilation and warm-up time could be fairly lengthy in comparison with the following coaching steps, it’s normally negligible in comparison with the general lifetime of the mannequin (i.e., the coaching or inference time). In some circumstances, nevertheless, the prolonged compilation time can change into a difficulty. If the mannequin is extraordinarily massive and we’re tuning for optimum efficiency, compilation may take hours. If we’re utilizing our mannequin in an inference server setup, the mannequin start-up time may have a direct impression on the server response time and person expertise.
On this part we cowl two strategies for decreasing mannequin compilation time: compile-time caching and regional compilation.
Compile Time Caching
In compile-time caching we add the outcomes of the native graph compilation to persistent storage. Each time we have to run the identical mannequin in the identical runtime surroundings (e.g., similar {hardware} and similar library variations) we pull the cache state from persistent storage to the native disk, as a substitute of compiling from scratch.
Regional Compilation
Regional compilation depends on the truth that massive fashions sometimes encompass computation blocks which are repeated a number of instances. In regional compilation, torch.compile is utilized to the repeating block, as a substitute of the complete mannequin. The result’s a single, comparatively small graph that’s created and reused for every of the blocks.
Easy methods to Configure the TORCH_LOGS Surroundings Variable
Torch compilation helps all kinds of logging controls. Whereas the log studies could be extraordinarily helpful for debugging points and maximizing efficiency, it’s essential to search out the suitable steadiness the place the logs are useful however not extreme. On this publish we suggest utilizing the next preliminary configuration and adapting as wanted:
export TORCH_LOGS="graph_breaks,recompiles,perf_hints"- “graph_breaks” — studies every time a graph-break is encountered (see above)
- “recompiles” — studies every time a recompilation is carried out together with the guard-violation that triggered it.
- “perf_hints” — outputs efficiency logs from the inductor backend together with hints for extra optimizations
Be aware that typically “perf_hints” will flood the console with unactionable messages, by which case chances are you’ll decide to disable it.
A Toy PyTorch Mannequin: Picture Captioning
To exhibit torch.compile in motion, we outline a toy picture captioning mannequin utilizing the favored Hugging Face transformers library (model 4.54.1). Particularly, we outline an image-to-text mannequin utilizing a VisionEncoderDecoderModel, with a Imaginative and prescient Transformer (ViT) encoder and a GPT-2 decoder, and practice it on an artificial dataset of fixed-sized photographs and random sequences (“captions”) of variable size.
We start by defining our image-to-text mannequin:
import os, shutil, time, random, torch
from transformers import (
VisionEncoderDecoderModel,
VisionEncoderDecoderConfig,
AutoConfig
)
torch.manual_seed(42)
random.seed(42)
BATCH_SIZE = 64
NUM_WORKERS = 12
NUM_TOKENS = 1024
MAX_SEQ_LEN = 256
PAD_ID = 0
START_ID = 1
END_ID = 2
# arrange image-to-text mannequin
def get_model():
config = VisionEncoderDecoderConfig.from_encoder_decoder_configs(
encoder_config=AutoConfig.for_model("vit"), # vit encoder
decoder_config=AutoConfig.for_model("gpt2") # gpt2 decoder
)
config.decoder.vocab_size = NUM_TOKENS
config.decoder.use_cache = False
config.decoder_start_token_id = START_ID
config.pad_token_id = PAD_ID
config.eos_token_id = END_ID
config.max_length = MAX_SEQ_LEN
mannequin = VisionEncoderDecoderModel(config=config)
# take away unused pooler
mannequin.encoder.pooler = None
# uncomment to specify the loss perform
# from transformers.loss.loss_utils import ForCausalLMLoss
# mannequin.loss_function = ForCausalLMLoss
return mannequinSubsequent, we outline an artificial dataset that generates pairs of random photographs of fastened measurement and random sequences of variable measurement. We use a weighted distribution for the sequence size to imitate a state of affairs the place the overwhelming majority of sequences are quick.
Given the various size of the enter captions, we require a technique for coping with dynamically formed enter. Right here, we provide two alternate options, each of which use padding: padding to the utmost enter size and padding to the size of the longest sequence within the batch, together with an choice to align it to a given a number of. Please see our earlier publish for extra methods for dealing with variable-length enter sequences.
from torch.utils.knowledge import Dataset, DataLoader
from functools import partial
# An artificial Dataset with random photographs and captions
class FakeDataset(Dataset):
def __init__(self):
self.length_dist = {
'quick': {'vary': (5, 32), 'weight': 0.90},
'medium': {'vary': (33, 64), 'weight': 0.09},
'lengthy': {'vary': (65, 256), 'weight': 0.01}
}
tremendous().__init__()
def __len__(self):
return 1000000
def __getitem__(self, index):
length_bin = random.decisions(
checklist(self.length_dist.keys()),
weights=[d['weight'] for d in self.length_dist.values()],
okay=1
)[0]
range_start, range_end = self.length_dist[length_bin]['range']
picture = torch.randn(3, 224, 224)
size = random.randint(range_start, range_end - 1)
labels = torch.cat([torch.randint(1, NUM_TOKENS, (length,)),
torch.tensor([END_ID])],
dim=0)
input_ids = torch.cat([torch.tensor([START_ID]),
labels[:-1]],
dim=0)
return {
'picture': picture,
'input_ids': input_ids,
'labels': labels
}
def pad_sequence(sequence, size, pad_val):
return torch.nn.purposeful.pad(
sequence,
(0, size - sequence.form[0]),
worth=pad_val
)
def collate_with_padding(batch, pad_to_longest=False, align=None):
padded_inputs = []
padded_labels = []
if pad_to_longest:
pad_len = max([b['input_ids'].form[0] for b in batch])
if align:
pad_len = ((pad_len + align - 1) // align) * align
else:
pad_len = MAX_SEQ_LEN
for b in batch:
input_ids = b['input_ids']
labels = b['labels']
padded_inputs.append(pad_sequence(input_ids, pad_len, PAD_ID))
padded_labels.append(pad_sequence(labels, pad_len, -100))
padded_inputs = torch.stack(padded_inputs, dim=0)
padded_labels = torch.stack(padded_labels, dim=0)
photographs = torch.stack([b['image'] for b in batch], dim=0)
return {
'pixel_values': photographs,
'decoder_input_ids': padded_inputs,
'labels': padded_labels,
'decoder_attention_mask': (padded_inputs != PAD_ID)
}
def get_dataloader(pad_to_longest=False, align=None):
return DataLoader(
dataset=FakeDataset(),
batch_size=BATCH_SIZE,
num_workers=NUM_WORKERS,
collate_fn=partial(
collate_with_padding,
pad_to_longest=pad_to_longest,
align=align
)
)Final, we outline our coaching step and most important coaching perform:
def copy_to_device(batch, gadget):
return {
key: val.to(gadget=gadget, non_blocking=True)
for key, val in batch.objects()
}
def train_step(mannequin, gadget, optimizer, batch):
# copy knowledge to gadget
batch = copy_to_device(batch, gadget)
optimizer.zero_grad()
with torch.amp.autocast('cuda', dtype=torch.bfloat16):
outputs = mannequin(**batch)
loss = outputs.loss
loss.backward()
optimizer.step()
return loss
def practice(local_rank=0, world_size=1, compile=False):
# specify log settings
torch._logging.set_logs(
graph_breaks=True,
recompiles=True,
perf_hints=True
)
torch.cuda.set_device(local_rank)
gadget = torch.cuda.current_device()
if world_size > 1:
# DDP setup
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
os.environ['MASTER_ADDR'] = 'localhost'
os.environ['MASTER_PORT'] = str(2222)
dist.init_process_group('nccl', rank=local_rank,
world_size=world_size)
# configure pad_to_longest and non-obligatory alignment
dataloader = get_dataloader(pad_to_longest=False, align=None)
mannequin = get_model()
mannequin = mannequin.to(gadget)
if world_size > 1:
mannequin = DDP(mannequin, [local_rank])
optimizer = torch.optim.Adam(mannequin.parameters())
if compile:
# uncomment to run pre-compile warmup - required for some optimizations
# batch = subsequent(iter(dataloader))
# train_step(mannequin, gadget, optimizer, batch)
mannequin, optimizer = apply_compilation(mannequin, optimizer)
warmup = 20
lively = 100
total_steps = warmup + lively
t0 = time.perf_counter()
for idx, batch in enumerate(dataloader, begin=1):
# apply practice step
train_step(mannequin, gadget, optimizer, batch)
if idx == warmup:
torch.cuda.synchronize()
print(f'warmup time: {time.perf_counter()-t0}')
t0 = time.perf_counter()
elif idx == total_steps:
break
if local_rank == 0:
torch.cuda.synchronize()
total_time = time.perf_counter() - t0
print(f'common throughput: {lively / total_time}')
if world_size > 1:
dist.destroy_process_group()
if __name__ == '__main__':
# specify inductor cache dir
inductor_cache_dir = '/tmp/inductor_cache'
os.environ['TORCHINDUCTOR_CACHE_DIR'] = inductor_cache_dir
# clear up compiler cache
torch._dynamo.reset()
shutil.rmtree(inductor_cache_dir, ignore_errors=True)
world_size = 1
torch.multiprocessing.spawn(
fn=practice,
args=(world_size,),
nprocs=world_size,
be a part of=True
)Baseline Efficiency
Operating the coaching script with out compilation yields the next baseline efficiency outcomes:
We are able to see clearly that the collation technique that reduces padding ends in a lot better efficiency.
Making use of Mannequin Compilation
On this part we’ll apply torch compilation with totally different configurations and measure its impression on the coaching throughput. We are going to start by making use of compilation with out dynamism, i.e., when padding all inputs to max sequence size. Within the following part we’ll consider its impression within the case of inputs with dynamic shapes.
Mannequin Compilation Step #1: Fixing Graph Breaks
We introduce the next compilation utility perform and apply it to our mannequin:
def apply_compilation(mannequin, optimizer):
mannequin = torch.compile(mannequin, fullgraph=True)
return mannequin, optimizerThe fullgraph setting ensures that compilation will fail at any time when it encounters a graph break. Positive sufficient, our first compilation try ends in an error coming from the transformer library. Here’s a small snippet:
from person code:
File "/decide/pytorch/lib/python3.12/site-packages/transformers/fashions/vision_encoder_decoder/modeling_vision_encoder_decoder.py", line 574, in ahead
loss = self.loss_function(
File "/decide/pytorch/lib/python3.12/site-packages/transformers/modeling_utils.py", line 5776, in loss_functionThe explanation for this error is that when the VisionEncoderDecoderModel loss perform just isn’t specified, the transformers library makes use of native Python code to find out what loss perform to use. That is simple to repair by specifying the mannequin loss perform, as follows:
from transformers.loss.loss_utils import ForCausalLMLoss
mannequin.loss_function = ForCausalLMLossFollowing this repair, mannequin compilation succeeds. The resultant throughput is 5.17 steps per second — a 66% speed-up over the baseline (fixed-input) throughput.
Be aware that within the present state of affairs of a static graph, the compiler didn’t report any recompilations, but it surely did report the next perf_hint:
I0805 13:37:52.406000 51587 torch/_inductor/codegen/simd.py:1976] [0/0] [__perf_hints] Discount over non-contiguous dims.
I0805 13:37:52.406000 51587 torch/_inductor/codegen/simd.py:1976] [0/0] [__perf_hints] Take into account setting config.triton.tile_reductions to True.Nevertheless, making use of the instructed configuration ends in a compilation error, so we ignore it going ahead.
Mannequin Compilation Step #2: Tuning the Compiler Configuration
Let’s attempt to improve the efficiency additional by making use of a number of the superior compilation controls. The code block under consists of three various modifications:
# reduce-overhead
mannequin = torch.compile(mannequin, fullgraph=True, mode="reduce-overhead")
# max-autotune
mannequin = torch.compile(mannequin, fullgraph=True, mode="max-autotune")
# shapes padding
mannequin = torch.compile(mannequin, fullgraph=True, choices={"shape_padding":True})The outcomes are captured within the desk under:
The next experiments on this part will likely be run with the “max-autotune” optimization.
Mannequin Compilation Step #3: Compiling the Optimizer
Subsequent, we prolong our answer to use compilation to the optimizer. Since optimizer compilation at present requires graph-breaks, we apply it with out the fullgraph flag:
def apply_compilation(mannequin, optimizer):
mannequin = torch.compile(mannequin, fullgraph=True, mode="max-autotune")
optimizer.step = torch.compile(optimizer.step)
return mannequin, optimizerCompiling the optimizer additional will increase the throughput to five.54 steps per second!!
When compiling the optimizer, the next efficiency trace is printed:
will likely be copied throughout cudagraphs execution.If utilizing cudagraphs and the grad tensor addresses would be the similar throughout runs, use torch._dynamo.decorators.mark_static_address to elide this copy.
The proposal is to repair the addresses of gradient tensors and mark them. To implement the suggestion, we introduce the next two utility features:
# this replaces default optimizer.zero_grad() and verifies reuse
# of similar gradient tensors
def zero_grads(mannequin):
for p in mannequin.parameters():
if p.grad just isn't None:
p.grad.zero_()
# makes use of dynamo utility to mark every of the gradient tensors as static
def mark_static_address(optimizer):
for group in optimizer.param_groups:
for p in group['params']:
if p.grad just isn't None:
torch._dynamo.mark_static_address(p.grad)The up to date coaching step seems under:
def train_step(mannequin, gadget, optimizer, batch):
# copy knowledge to gadget
batch = copy_to_device(batch, gadget)
zero_grads(mannequin)
with torch.amp.autocast('cuda', dtype=torch.bfloat16):
outputs = mannequin(**batch)
loss = outputs.loss
loss.backward()
mark_static_address(optimizer)
optimizer.step()
return lossIn our case, implementing the efficiency trace decreases the throughput consequence to five.32 steps per second — so we disregard it.
Mannequin Compilation Step #4: Foreach Map Optimization
Continually be looking out for torch.compile enhancements and additions. Right here we’ll apply horizontal fusion with foreach_map — an optimization launched within the newest PyTorch launch — to the optimizer step. Utilizing the utility features from the Foreach Map tutorial, we create an optimized Adam optimizer step perform, and apply it to our optimizer:
def get_compiled_adam_step(optimizer):
compiled_adam = torch.compile(foreach_map_adam)
inputs = get_inputs(optimizer)
def compiled_adam_step():
compiled_adam(*inputs)
return compiled_adam_step
def apply_compilation(mannequin, optimizer):
mannequin = torch.compile(mannequin, fullgraph=True, mode="max-autotune")
optimizer.step = get_compiled_adam_step(optimizer)
return mannequin, optimizerThis optimization requires use of the zero_grads utility from above. It additionally requires that we run a warmup coaching step earlier than compilation to populate the entire gradient tensors.
The modified optimizer step ends in a lowered throughput of 5.28 steps per second. We presume that our toy mannequin is simply too small to reap the advantage of the brand new compilation characteristic.
Our greatest consequence, 5.54 steps per second, is 78% quicker than our baseline consequence. Let’s see what occurs after we prolong our answer to a number of GPUs.
Mannequin Compilation Step #5: Extending to DDP
The ultimate step is to increase the coaching script to make use of all 8 GPUs. For this step we have to disable the fullgraph setting for the reason that cross-GPU gradient sharing requires graph-breaking communication calls.
The resultant throughput is 4.59 steps per second, practically two instances quicker than our baseline consequence.
Outcomes
The desk under summarizes the outcomes of our static-graph experiments:
So far, all of our experiments have assumed fixed-sized enter tensors. Because the overwhelming majority of enter sequences are small, our graph is performing an enormous quantity of wasteful computation.
Within the subsequent part we’ll consider torch.compile when padding to variable-length inputs.
Dynamic Mannequin Compilation
On this part we introduce dynamism into our toy mannequin definition by padding the inputs sequences in every batch to the size of the longest sequence. In a earlier part we described a number of methods for compiling dynamic graphs. We are going to apply these methods and assess their impression on the coaching throughput.
The experiments on this part have been run on a single NVIDIA A100 GPU.
Possibility #1: Auto-Detect Dynamism
The default habits (dynamic=None) of torch.compile is to auto-detect dynamism and recompile the graph accordingly. When working on this setting, we certainly see the recompilation because of the variation in enter measurement, however we additionally get the next print:
V0806 09:31:00.624000 175763 torch/_dynamo/guards.py:2997] [0/1] [__recompiles] - 0/1: ((decoder_input_ids.measurement()[1]*decoder_input_ids.measurement()[1]) % 8) != 0 # attn_output = torch.nn.purposeful.scaled_dot_product_attention( # transformers/integrations/sdpa_attention.py:89 in sdpa_attention_forward (_dynamo/utils.py:3284 in run_node)The supply of this recompilation is the scaled_dot_product_attention operator, which requires that enter shapes be aligned to multiples of eight for optimum use. To deal with this challenge and keep away from the recompilation, we modify our padding operation to pad to a a number of of eight.
To keep away from the recompilation that’s triggered by the variable-length inputs, we outline the next utility and apply it to the enter tensors:
def mark_dynamic(batch):
for key in ['decoder_input_ids', 'labels', 'decoder_attention_mask']:
torch._dynamo.mark_dynamic(batch[key], 1)
def train_step(mannequin, gadget, optimizer, batch):
# copy knowledge to gadget
batch = copy_to_device(batch, gadget)
# mark inputs as dynamic to keep away from recompilation
mark_dynamic(batch)
optimizer.zero_grad()
with torch.amp.autocast('cuda', dtype=torch.bfloat16):
outputs = mannequin(**batch)
loss = outputs.loss
loss.backward()
optimizer.step()
return lossThis selection ends in a throughput of seven.78 steps per second, 64% greater than the baseline throughput (4.73).
A further speed-up is achieved after we apply the “max-autotune” mode — 8.13 steps per second.
Possibility #2: Dynamic Compilation
One other option to keep away from recompilations is to name torch.compile with dynamic=True:
def apply_compilation(mannequin, optimizer):
mannequin = torch.compile(mannequin, fullgraph=True, dynamic=True)
optimizer.step = torch.compile(optimizer.step)
return mannequin, optimizerThis ends in a throughput of seven.77 steps per second. Since setting dynamic=True precludes using CUDA graphs, we try to optimize additional by setting mode=”max-autotune-no-cudagraphs”. This ends in a throughput of seven.89 steps per second.
Possibility #3: Compile a Fastened Variety of Static Graphs
The final possibility we discover is to set a hard and fast variety of supported enter shapes and compile a corresponding fastened variety of static graphs. Because the default variety of recompilations supported is eight, we program our collator to emit eight totally different tensor shapes by aligning the padding to multiples of 32. To pressure the recompilations, we set dynamic=False.
The resultant throughputs are for 7.77 steps per second for the default mode and eight.04 for mode=”max-autotune”.
Be aware that this feature could require a larger variety of warmup steps to make sure that all form variations are processed. (Another is to manually feed the mannequin with all form variations earlier than beginning the coaching loop.)
Modular Compilation
Since our mannequin naturally splits into two submodules — a static encoder and a dynamic decoder — it’s tempting to discover the choice of making use of separate compilation to every part. Be aware that in an inference setting, it’s important to compile the encoder and decoder individually, for the reason that encoder is known as solely as soon as, whereas the decoder is known as repeatedly in an auto-regressive loop.
def apply_compilation(mannequin, optimizer):
mannequin.encoder = torch.compile(mannequin.encoder, fullgraph=True)
mannequin.decoder = torch.compile(mannequin.decoder, fullgraph=True)
mannequin.loss_function = torch.compile(mannequin.loss_function, fullgraph=True)
optimizer.step = torch.compile(optimizer.step)
return mannequin, optimizerThe results of this technique is a throughput of seven.93, which is barely greater than the consequence we acquired (in default mode) when compiling the complete mannequin.
One benefit to this strategy is the power to tune the compilation controls to every submodule independently. For instance, setting mode=”max-autotune” to simply the encoder, additional elevated the throughput to eight.04 steps per second.
Outcomes
We summarize the outcomes of our dynamic-graph experiments within the desk under:
The perfect consequence was 8.13 steps per second, 72% greater than the baseline consequence (4.73). It’s doubtless that additional tuning may end in further features.
Remember that the impression of torch.compile can range vastly primarily based on the small print of the mannequin and the runtime surroundings.
Decreasing Compilation Time
We now flip our consideration to the period of the torch.compile warmup. We are going to assess the 2 optimizations mentioned above, compile-time caching and regional compilation. We restrict our experiments to a single GPU. We use the default utility of torch.compile and measure the period of the primary 20 coaching iterations.
Pre-Loading Compilation Cache
Within the following demonstration of compile-time caching, we use an Amazon S3 bucket as our persistent storage location:
import boto3
S3_BUCKET = ""
S3_KEY = ""
def download_cache():
s3_client = boto3.consumer('s3')
t0 = time.perf_counter()
strive:
response = s3_client.get_object(Bucket=S3_BUCKET, Key=S3_KEY)
artifact_bytes = response['Body'].learn()
torch.compiler.load_cache_artifacts(artifact_bytes)
print(f"Cache restored. Time: {time.perf_counter()-t0} sec")
besides:
return False
return True
def upload_cache():
s3_client = boto3.consumer('s3')
artifact_bytes, cache_info = torch.compiler.save_cache_artifacts()
s3_client.put_object(
Bucket=S3_BUCKET,
Key=S3_KEY,
Physique=artifact_bytes
)
if __name__ == '__main__':
# specify inductor cache dir
inductor_cache_dir = '/tmp/inductor_cache'
os.environ['TORCHINDUCTOR_CACHE_DIR'] = inductor_cache_dir
# clear up compiler cache
torch._dynamo.reset()
shutil.rmtree(inductor_cache_dir, ignore_errors=True)
# add the compilation artifacts
download_cache()
# practice the mannequin
practice()
# add the compilation artifacts
upload_cache()This methodology reduces the compilation warmup from 196 seconds to 56 seconds — a 3.5X speed-up.
Regional Compilation
To implement regional compilation, we apply compilation to the interior blocks of each the encoder and the decoder:
def apply_compilation(mannequin, optimizer):
mannequin.encoder.encoder.layer = torch.nn.ModuleList(
[torch.compile(layer, fullgraph=True)
for layer in model.encoder.encoder.layer]
)
mannequin.decoder.transformer.h = torch.nn.ModuleList(
[torch.compile(layer, fullgraph=True)
for layer in model.decoder.transformer.h]
)
mannequin.loss_function = torch.compile(mannequin.loss_function, fullgraph=True)
optimizer.step = torch.compile(optimizer.step)
return mannequin, optimizerThis transformation reduces the throughput from 7.78 steps per second to 7.61 steps per second. Alternatively, the compilation warmup drops from 196 seconds to 80 seconds — a 2.45X speed-up.
Within the case of our toy mannequin — which is extraordinarily small by right now’s requirements — the features we now have demonstrated are modest. However for giant fashions, some of these compilation-time optimization strategies may show important.
Abstract
As AI/ML fashions develop in measurement to tons of of billions and even trillions of parameters, optimizing their runtime efficiency turns into more and more important. For PyTorch fashions, torch.compile is among the strongest optimization instruments at your disposal. This publish has aimed to ease the adoption of torch.compile by addressing a few of its intricacies and demonstrating its sensible use. Among the most important strategies we lined have been:
- Decreasing graph-breaks and recompilations
- Tuning compilation settings to maximise efficiency features
- Efficient use of the PyTorch logs
- High-down vs. bottom-up debugging methods
- Modular utility of torch.compile
- Decreasing the period of compilation warmup
PyTorch compilation is a fancy and nuanced matter. On this publish we now have lined simply a few of its many options. For extra on the subject, be discuss with the official documentation.

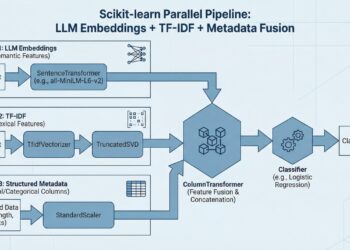














{kind=link}