


the basic ideas you should know to know Reinforcement Studying!
We’ll progress from absolutely the fundamentals of “what even is RL” to extra superior subjects, together with agent exploration, values and insurance policies, and distinguish between fashionable coaching approaches. Alongside the way in which, we can even be taught concerning the varied challenges in RL and the way researchers have tackled them.
On the finish of the article, I can even share a YouTube video I made that explains all of the ideas on this article in a visually partaking approach. In case you are not a lot of a reader, you may take a look at that companion video as a substitute!
Notice: All photos are produced by the writer until in any other case specified.
Reinforcement Studying Fundamentals
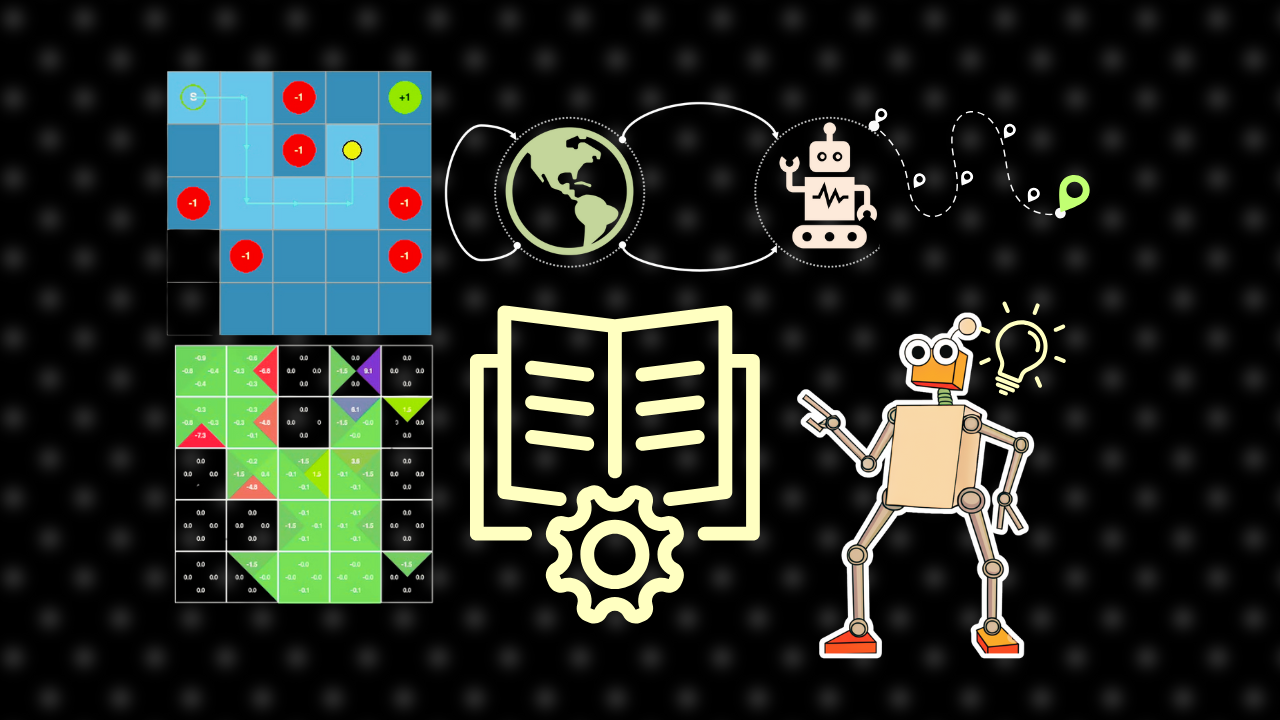
Suppose you need to prepare an AI mannequin to learn to navigate an impediment course. RL is a department of Machine Studying the place our fashions be taught by gathering experiences – taking actions and observing what occurs. Extra formally, RL consists of two elements – the agent and the surroundings.
The Agent
The training course of entails two key actions that occur time and again: exploration and coaching. Throughout exploration, the agent collects experiences within the surroundings by taking actions and discovering out what occurs. After which, in the course of the coaching exercise, the agent makes use of these collected experiences to enhance itself.

The Surroundings
As soon as the agent selects an motion, the surroundings updates. It additionally returns a reward relying on how nicely the agent is doing. The surroundings designer applications how the reward is structured.
For instance, suppose you might be engaged on an surroundings that teaches an AI to keep away from obstacles and attain the purpose. You possibly can program your surroundings to return a constructive reward when the agent is shifting nearer to the purpose. But when the agent collides with an impediment, you may program it to obtain a big detrimental reward.
In different phrases, the surroundings offers a constructive reinforcement (a excessive constructive reward, for instance) when the agent does one thing good and a punishment (a detrimental reward for instance) when it does one thing unhealthy.
Though the agent is oblivious to how the surroundings truly operates, it might nonetheless decide from its reward patterns the right way to choose optimum actions that result in most rewards.

Coverage
At every step, the agent AI observes the present state of the surroundings and selects an motion. The purpose of RL is to be taught a mapping from observations to actions, i.e. “given the state I’m observing, what motion ought to I select”?
In RL phrases, this mapping from the state to motion can also be referred to as a coverage.
This coverage defines how the agent behaves in numerous states, and in deep reinforcement studying we be taught this perform by coaching some sort of a deep neural community.
Reinforcement Studying

Understanding the distinctions and interaction between the agent, the coverage, and the surroundings may be very integral to know Reinforcement Studying.
- The Agent is the learner that explores and takes actions inside the surroundings
- The Coverage is the technique (typically a neural community) that the agent makes use of to find out which motion to take given a state. In RL, our final purpose is to coach this technique.
- The Surroundings is the exterior system that the agent interacts with, which offers suggestions within the type of rewards and new states.
Here’s a fast one-liner definition it is best to bear in mind:
In Reinforcement Studying, the agent follows a coverage to pick out actions inside the surroundings.
Observations and Actions
The agent explores the surroundings by taking a sequence of “steps”. Every step is one resolution. The agent observes the surroundings’s state. Decides on an motion. Receives a reward. Observes the subsequent state. On this part, let’s perceive what observations and actions are.
Commentary
Commentary is what the agent sees from the surroundings – the knowledge it receives concerning the surroundings’s present state. In an impediment navigation surroundings, the remark is likely to be LiDAR projections to detect the obstacles. For Atari video games, it is likely to be a historical past of the previous couple of pixel frames. For textual content era, it is likely to be the context of the generated tokens to this point. In chess, it’s the place of all of the items, whose transfer it’s, and so on.
The remark ideally incorporates all the knowledge the agent must take an motion.
The motion house is all of the out there selections the agent can take. Actions may be discrete or steady. A discrete motion house is when the agent has to decide on between a selected set of categorical selections. For instance, in Atari video games, the actions is likely to be the buttons of an Atari controller. For textual content era, it’s to decide on between all of the tokens current within the mannequin’s vocabulary. In chess, it may very well be a listing of accessible strikes.

The surroundings designer may also select a steady motion house – the place the agent generates steady values to take a “step” within the surroundings. For instance, in our impediment navigation instance, the agent can select the x and y velocities to get a advantageous grain management of the motion. In a human character management process, the motion is commonly to output the torque or goal angle for each joint within the character’s skeleton.
A very powerful lesson
However right here is one thing crucial to know: To the agent and the coverage – the surroundings and its specifics generally is a full black field. The agent will obtain vector-state data as an remark, generate an motion, obtain a reward, and later be taught from it.
So in your thoughts, you may contemplate the agent and the surroundings as two separate entities. The surroundings defines the state house, the motion house, the reward methods, and the foundations.
These guidelines are decoupled from how the agent explores and the way the coverage is educated on the collected experiences.
When finding out a analysis paper, it is very important make clear in our thoughts which side of RL we’re studying about. Is it a couple of new surroundings? Is it a couple of new coverage coaching technique? Is it about an exploration technique? Relying on the reply, you may deal with different issues as a black field.
Exploration
How does the agent discover and accumulate experiences?
Each RL algorithm should resolve one of many largest dilemmas in coaching RL brokers – exploration vs exploitation.
Exploration means attempting out new actions to assemble details about the surroundings. Think about you might be studying to battle a boss in a troublesome online game. At first, you’ll strive totally different approaches, totally different weapons, spells, random issues simply to see what sticks and what doesn’t.
Nonetheless, when you begin seeing some rewards, like constantly deal injury to the boss, you’ll cease exploring and begin exploiting the technique you have got already acquired. Exploitation means greedily selecting actions you assume will get the very best rewards.
A superb RL exploration technique should steadiness exploration and exploitation.
A well-liked exploration technique is Epsilon-Grasping, the place the agent explores with a random motion a fraction of the time (outlined by a parameter epsilon), and exploits its best-known motion the remainder of the time. This epsilon worth is often excessive in the beginning and is progressively decreased to favor exploitation because the agent learns.

Epsilon grasping solely works in discrete motion areas. In steady areas, exploration is commonly dealt with in two fashionable methods. A method is so as to add a little bit of random noise to the motion the agent decides to take. One other fashionable method is so as to add an entropy bonus to the loss perform, which inspires the coverage to be much less sure about its decisions, naturally resulting in extra various actions and exploration.
Another methods to encourage exploration are:
- Design the surroundings to make use of random initialization of states at first of the episodes.
- Intrinsic exploration strategies the place the agent acts out of its personal “curiosity.” Algorithms like Curiosity and RND reward the agent for visiting novel states or taking actions the place the result is tough to foretell.
I cowl these fascinating strategies in my Agentic Curiosity video, so make sure you examine that out!
Coaching Algorithms
A majority of analysis papers and tutorial subjects in Reinforcement Studying are about optimizing the agent’s technique to choose actions. The purpose of optimization algorithms is to be taught actions that maximize the long-term anticipated rewards.
Let’s check out the totally different algorithmic decisions one after the other.
Mannequin-Based mostly vs Mannequin-Free
Alright, so our agent has explored the surroundings and picked up a ton of expertise. Now what?
Does the agent be taught to behave straight from these experiences? Or does it first attempt to mannequin the surroundings’s dynamics and physics?
One method is model-based studying. Right here, the agent first makes use of its expertise to construct its personal inside simulation, or a world mannequin. This mannequin learns to foretell the implications of its actions, i.e., given a state and motion, what’s the ensuing subsequent state and reward? As soon as it has this mannequin, it might observe and plan fully inside its personal creativeness, working 1000’s of simulations to seek out the very best technique with out ever taking a dangerous step in the true world.

That is notably helpful in environments the place gathering actual world expertise may be costly – like robotics or self-driving vehicles. Examples of Mannequin-Based mostly RL are: Dyna-Q, World Fashions, Dreamer, and so on. I’ll write a separate article sometime to cowl these fashions in additional element.
The second is known as model-free studying. That is what the remainder of the article goes to cowl. Right here, the agent treats the surroundings as a black field and learns a coverage straight from the collected experiences. Let’s speak extra about Mannequin-free RL within the subsequent part.
Worth-Based mostly Studying
There are two most important approaches to model-free RL algorithms.
Worth-based algorithms be taught to judge how good every state is. Coverage-based algorithms be taught straight the right way to act in every state.

In value-based strategies, the RL agent learns the “worth” of being in a selected state. The worth of a state actually means how good the state is. The instinct is that if the agent is aware of which states are good, it might choose actions that result in these states extra repeatedly.
And grateful there’s a mathematical approach of doing this – the Bellman Equation.
V(s) = r + γ * max V(s’).
This recurrence equation principally says the worth V(s) of state s is the same as the quick reward r of being within the state plus the worth of the very best next-state s‘ the agent can attain from s. Gamma (γ) is a reduced issue (between 0 and 1) that nerfs the goodness of the subsequent state. It basically decides how a lot the agent cares about rewards within the distant future versus quick rewards. A γ near 1 makes the agent “far-sighted,” whereas a γ near 0 makes the agent “short-sighted,” greedily caring nearly solely concerning the very subsequent reward.
Q-Studying
We learnt the instinct behind state values, however how will we use that data to be taught actions? The Q-Studying equation solutions this.
Q(s, a) = r + γ * max_a Q(s’, a’)
The Q-value Q(s,a) is the quality-value of the motion a in state s. The above equation principally states: The standard of an motion a in state s is the quick reward r you get from being in state s, plus the discounted high quality worth of the subsequent greatest motion.
So in abstract:
- Q-values are the standard values of every motion in every state.
- V-values are the worth of a selected state; it is the same as the utmost Q-value of all actions in that state.
- Coverage π at a selected state is the motion that has the very best Q-value in that state.

To be taught extra about Q-Studying, you may analysis Deep Q Networks, and their descendants, like Double Deep Q Networks and Dueling Deep Q Networks.
Worth-based studying trains RL brokers by studying the worth of being in particular states. Nonetheless, is there a direct solution to be taught optimum actions with no need to be taught state values? Sure.
Coverage studying strategies straight be taught optimum motion methods with out explicitly studying state values. Earlier than we learn the way, we should be taught one other necessary idea first. Temporal Distinction Studying vs Monte Carlo Sampling.
TD Studying vs MC Sampling
How does the agent consolidate future experiences to be taught?
In Temporal Distinction (TD) Studying, the agent updates its worth estimates after each single step utilizing the Bellman equation. And it does so by seeing its personal estimate of the Q-value within the subsequent state. This technique is known as 1-step TD Studying, or one-step Temporal Distinction Studying. You are taking one step and replace your studying based mostly in your previous estimates.

The second choice is known as Monte-Carlo sampling. Right here, the agent waits for the whole episode to complete earlier than updating something. After which it makes use of the whole return from the episode:
Q(s,a) = r₁ + γr₂ + γ²r₃ + … + γⁿrₙ

Commerce-offs between TD Studying and MC Sampling
TD Studying is fairly cool coz the agent can be taught one thing from each single step, even earlier than it completes an episode. That means it can save you your collected experiences for a very long time and maintain coaching even on outdated experiences, however with new Q-values. Nonetheless, TD studying is closely biased by the agent’s present estimate of the state. So if the agent’s estimates are unsuitable, it can maintain reinforcing these unsuitable estimates. That is referred to as the “bootstrapping drawback.”
However, Monte Carlo studying is at all times correct as a result of it makes use of the true returns from precise episodes. However in most RL environments, rewards and state transitions may be random. Additionally, because the agent explores the surroundings, its personal actions may be random, so the states it visits throughout rollout are additionally random. This leads to the pure TD-Studying technique affected by excessive variance points as returns can differ dramatically between episodes.
Coverage Gradients
Alright, now that we’ve understood the idea of TD-Studying vs MC Sampling, it’s time to get again to Coverage-Based mostly Studying strategies.
Recall that value-based strategies like DQN first should explicitly calculate the worth, or Q-value, for each single potential motion, after which they choose the very best one. However it’s potential to skip this step, and Coverage Gradient strategies like REINFORCE do precisely that.

In REINFORCE, the coverage community outputs chances for every motion, and we prepare it to extend the likelihood of actions that result in good outcomes. For discrete areas, PG strategies output the likelihood of every motion as a categorical distribution. For steady areas, PG strategies output as Gaussian distributions, predicting the imply and customary deviation of every factor within the motion vector.
So the query is, how precisely do you prepare such a mannequin that straight predicts motion chances from states?
Right here is the place the Coverage Gradient Theorem is available in. On this article, I’ll clarify the core thought intuitively.
- Our coverage gradient mannequin is commonly denoted within the literature as pi_theta(a|s). Right here, theta denotes the weights of the neural community. pi_theta(a|s) is the anticipated likelihood of motion a in state s by neural community theta.
- From a newly initialized coverage community, we let the agent play out a full episode and accumulate all of the rewards.
- For each motion it took, work out the entire discounted return that got here after it. That is carried out utilizing the Monte Carlo method.
- Lastly, to truly prepare the mannequin, the coverage gradient theorem asks us to maximise the formulation offered within the determine beneath.
- If the return was excessive, this replace will make that motion extra possible sooner or later by rising pi(a|s). If the return was detrimental, this replace will make the motion much less possible by lowering the pi(a|s).

The excellence between Q-Studying and REINFORCE
One of many core variations between Q-Studying and REINFORCE is that Q-Studying makes use of 1-step TD Studying, and REINFORCE makes use of Monte Carlo Sampling.
By utilizing 1-step TD, Q-learning should decide the standard worth Q of every state-action risk. As a result of recall that in 1-step TD the agent can take only one step within the surroundings and decide a top quality rating of the state.
However, with Monte Carlo sampling, the agent doesn’t have to depend on an estimator to be taught. As a substitute, it makes use of precise returns noticed throughout exploration. This makes REINFORCE “unbiased” with the caveat that it requires a number of samples to appropriately estimate the worth of a trajectory. Moreover, the agent can not prepare till it totally finishes a trajectory (that’s attain a terminal state), and it can not reuse trajectories after the coverage community updates.
In observe, REINFORCE typically results in stability points and pattern inefficiency. Let’s speak about how Actor Critic addresses these limitations.
Benefit Actor Critic
When you attempt to use vanilla REINFORCE on most advanced issues, it can wrestle, and the rationale why is twofold.
The primary is as a result of it suffers from excessive variance coz it’s a Monte Carlo sampling technique. Second, it has no sense of baseline. Like, think about an surroundings that at all times offers you a constructive reward, then the returns won’t ever be detrimental, so REINFORCE will enhance the possibilities of all actions, albeit in a disproportionate approach.
We don’t need to reward actions only for getting a constructive rating. We need to reward them for being higher than common.
And that’s the place the idea of benefit turns into necessary. As a substitute of simply utilizing the uncooked return to replace our coverage, we’ll subtract the anticipated return for that state. So our new replace sign turns into:
Benefit = The Return you bought – The Return you anticipated
Whereas Benefit offers us a baseline for our noticed returns, let’s additionally talk about the idea of Actor Critic strategies.
Actor Critic combines the very best of Worth-Based mostly Strategies (like DQN) and the very best of Coverage-Based mostly Strategies (like REINFORCE). Actor Critic strategies prepare a separate “critic” neural community that’s solely educated to judge states, very like the Q-Community from earlier.
The actor technique, alternatively, learns the coverage.

Combining Benefit and Actor critics, we are able to perceive how the fashionable A2C algorithm works:
- Initialize 2 neural networks: the coverage or actor community, and the worth or critic community. The actor community inputs a state and outputs motion chances. The critic community inputs a state and outputs a single float representing the state’s worth.
- We generate some rollouts within the surroundings by querying the actor
- We replace the critic community utilizing both TD Studying or Monte Carlo Studying. There are extra superior approaches, like Generalized Benefit Estimates as nicely, that mix the 2 approaches for extra steady studying.
- We consider the benefit by subtracting the noticed return from the common return generated by the Critic Community
- Lastly, we replace the Coverage community through the use of the benefit and the coverage gradient equation.
Actor-critic strategies resolve the variance drawback in coverage gradients through the use of a worth perform as a baseline. PPO (Proximal Coverage Optimization) extends A2C by including the ideas of “belief areas” into the training algorithm, which prevents extreme adjustments to the community weights throughout studying. We received’t get into particulars about PPO on this article; perhaps sometime we are going to open that Pandora’s field.
Conclusion
This text is a companion piece to the YouTube video beneath I made. Be happy to test it out, if you happen to loved this learn.
Each algorithm makes particular decisions for every query, and these decisions cascade by way of the whole system, affecting every little thing from pattern effectivity to stability to real-world efficiency.
In the long run, creating an RL algorithm is about answering these issues by making your decisions. DQNs select to be taught values. coverage strategies straight learns a **coverage**. Monte Carlo strategies replace after a full episode utilizing precise returns – this makes them unbiased, however they’ve excessive variance due to the stochastic nature of RL exploration. TD Studying as a substitute chooses to be taught at each step based mostly on the agent’s personal estimates. Actor Critic strategies mix DQNs and Coverage Gradients by studying an actor and a critic community individually.
Notice that there’s loads we didn’t cowl at present. However it is a good base to get you began with Reinforcement Studying.
That’s the top of this text, see you within the subsequent one! You need to use the hyperlinks beneath to find extra of my work.
My Patreon:
https://www.patreon.com/NeuralBreakdownwithAVB
My YouTube channel:
https://www.youtube.com/@avb_fj
Observe me on Twitter:
https://x.com/neural_avb
Learn my articles:
https://towardsdatascience.com/writer/neural-avb/














{kind=link}